Code Structure
The core of the software is the RobotPrimitives-class, which is used as the parent class of the software.
It provides the member functions, e.g., getForwardKinematics(), getSpatialJacobian(), getHybridJacobian(), getBodyJacobian(), getMassMatrix() for deriving the robot parameters.
By inheriting the RobotPrimitives-class, a new robot class can be defined that shares the attributes and the member functions
of the parent class.
Each robot class brings its kinematic and dynamic properties (e.g., axes of rotation, link lengths, masses, etc.). Note that for Exp[licit]-MATLAB, all member functions also accept symbolic arguments. This feature is helpful for control methods that require an analytical formulation of the robot’s equations of motion, e.g., adaptive control methods.
Structure of Exp[licit]-MATLAB
While Exp[licit]-MATLAB supports various robots, we show here a Franka robot example (main_franka.m), which is inherited from the RobotPrimitives-class.
The initialization is shown below:
% Call Franka Robot
robot = franka( );
robot.init( );
The init()-function initializes all Joint Twists and Generalized Mass Matrices for the initial configuration.
For visualization, the robot object can be passed to a 2D or 3D-animation object:
% Create animation
anim = Animation('Dimension', 3, 'xLim', [-0.7,0.7], 'yLim', [-0.7,0.7], 'zLim', [0,1.4]);
anim.init( );
anim.attachRobot( robot )
The Animation-class heavily relies on MATLAB graphic functions (e.g., axes, patches, lighting).
The Animation-class has an optional input that allows the recording of videos with adjustable playback speeds.
At run-time (simulation time t), the robot object (in configuration q) and the animation can be updated:
% Update kinematics
robot.updateKinematics( q );
anim.update( t );
For first-time users, we provide a simple example simulation. By default, the simulation loop is set to be real-time:
% Cyclic code starts here
while t <= simTime
tic
% YOUR CONTROLLER
% Do not go faster than real time
while toc < dt
% do nothing
end
end
The structure of the example application is the following: (1) calculation of all kinematic and dynamic robot parameters;
(2) trajectory generation; (3) control law; (4) integration and update. For (1), the member functions of the robot object are used.
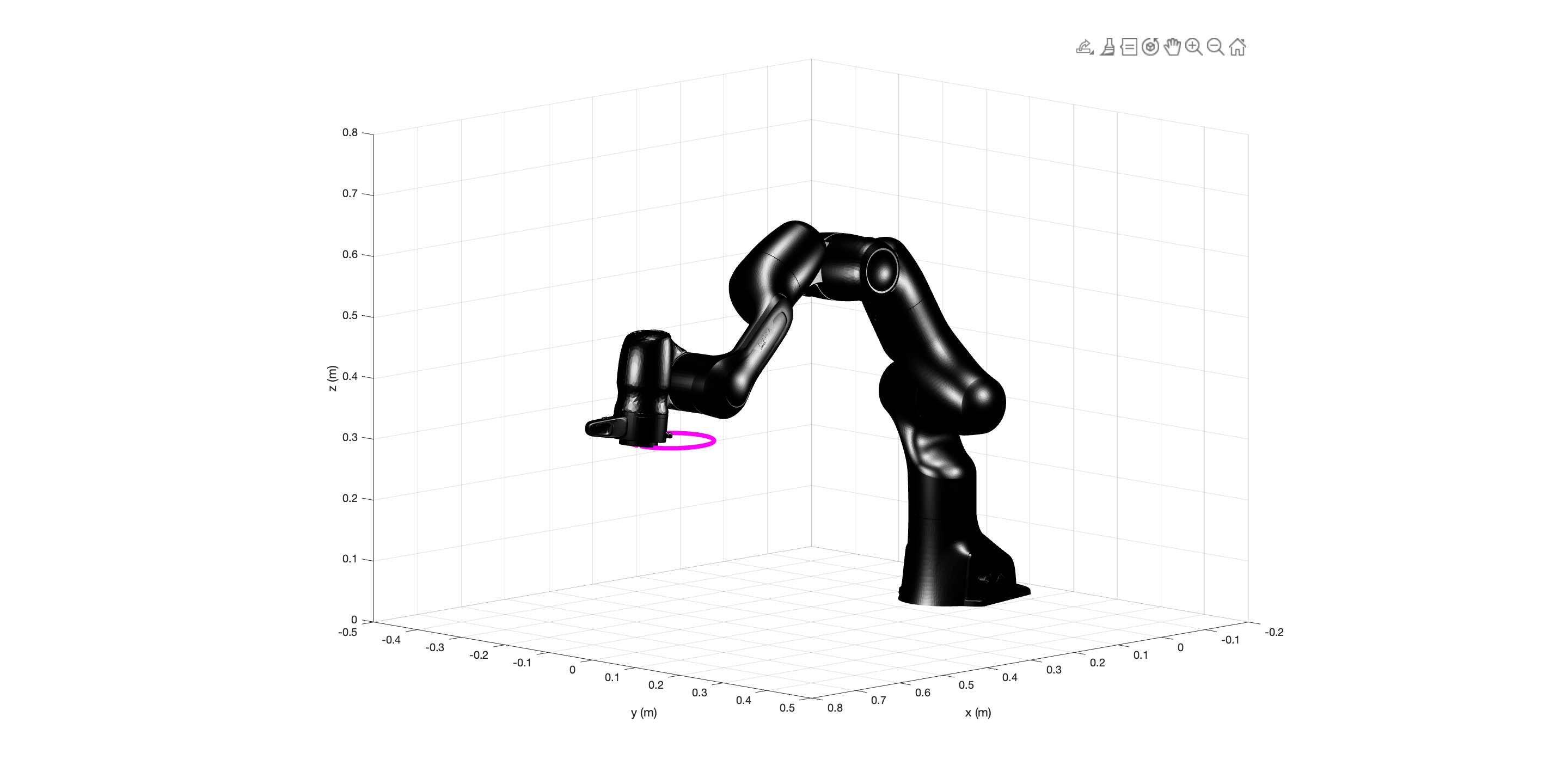
While (2) and (3) are generally user specific, we implemented a simple impedance controller for the Franka robot
(main_franka.m) that moves the end-effector around a circular trajectory. For the integration (4), any integrator can be used,
e.g., MATLAB’s pre-built ode45.m.
Structure of Exp[licit]-C++
Currently, Exp[licit]-cpp supports one robot, the KUKA LBR iiwa 14. During the initialization, a robot object can be created,
which is inherited from the RobotPrimitives-class. The initialization is shown below:
// Use Explicit-cpp to create your robot
myLBR = new iiwa14( 1, "Trey");
myLBR->init( );
// Current joint configuration
q = Eigen::VectorXd::Zero( myLBR->nq );
Here, the init()-member function initializes all Joint Twists and Generalized Mass Matrices for the initial configuration. The member
functions of the myLBR-object can then be used:
// Homogeneous Transformation Matrix
H = myLBR->getForwardKinematics( q );
// Hybrid Jacobian Matrix (6x7)
J = myLBR->getHybridJacobian( q );
// Mass matrix
M = myLBR->getMassMatrix( q );