Derivation of Franka’s Inertia Parameters
The original values are derived from Figure 4 of the paper from Ledezma, Fernando Diaz and Haddadin, Sami. For the \(i\)-th link, the mass \(m\), mass times the center of mass location \(mc_x\), \(mc_y\), \(mc_z\), and the 6 paramters of the inertia tensor matrix, \(I_{xx}\), \(I_{xy}\), \(I_{xz}\), \(I_{yy}\), \(I_{yz}\), \(I_{zz}\) about the center of mass are:
Linkage |
\(m\) (\(kg\)) |
\(mc_x\), \(mc_y\), \(mc_z\) (\(kg\cdot m\)) |
\(I_{xx}\), \(I_{xy}\), \(I_{xz}\), \(I_{yy}\), \(I_{yz}\), \(I_{zz}\) (\(kg\cdot m^2\)) |
|---|---|---|---|
Link 1, \(i=1\) |
4.9707 |
(0.0193, 0.0103, -0.4654) |
(0.7470, -0.0002, 0.0086, 0.7503, 0.0201, 0.0092) |
Link 2, \(i=2\) |
0.6469 |
(-0.0020, -0.0186, 0.0023) |
(0.0085, -0.0040, 0.0103, 0.0281, 0.0008, 0.0265) |
Link 3, \(i=3\) |
3.2286 |
(0.0888, 0.1267, -0.2147) |
(0.0565, -0.0082, -0.0055, 0.0529, -0.0044, 0.0182) |
Link 4, \(i=4\) |
3.5879 |
(-0.1908, 0.3746, 0.0985) |
(0.0677, 0.0277, 0.0039, 0.0324, -0.0016, 0.0776) |
Link 5, \(i=5\) |
1.2259 |
(-0.0147, 0.0503, -0.0471) |
(0.0394, -0.0015, -0.0046, 0.0315, 0.0022, 0.0109) |
Link 6, \(i=6\) |
1.6666 |
(0.1002, -0.0235, -0.0175) |
(0.0025, 0.0015, -0.0001, 0.0106, 0.0001, 0.0118) |
Link 7, \(i=7\) |
1.4655 |
(0.0004, -0.0031, 0.1453) |
(0.0308, 0.0004, -0.0007, 0.0284, -0.0005, 0.0067) |
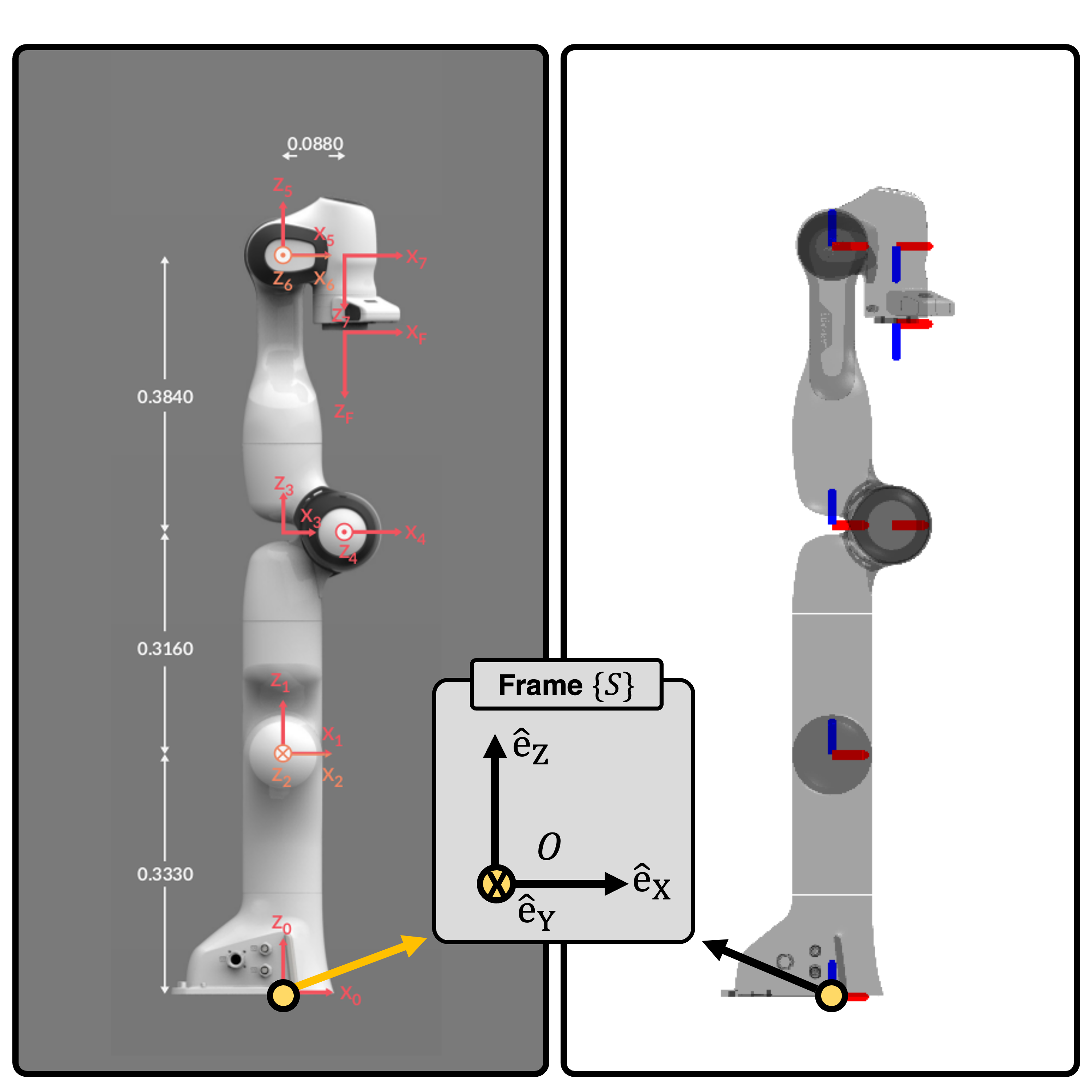
The inertial parameters of the \(i\)-th link are described with respect to the frame on the \(i\)-th joint. This frame is defined by the Denavit–Hartenberg (DH) parameters. The DH parameters for the Franka can be found on this website and are shown below:
Joint |
\(a\) (m) |
\(d\) (m) |
\(\alpha\) (rad) |
\(\theta\) (rad) |
|---|---|---|---|---|
Joint 1 |
0 |
0.333 |
0 |
\(\theta_1\) |
Joint 2 |
0 |
0 |
\(-\pi/2\) |
\(\theta_2\) |
Joint 3 |
0 |
0.316 |
\(\pi/2\) |
\(\theta_3\) |
Joint 4 |
0.0825 |
0 |
\(\pi/2\) |
\(\theta_4\) |
Joint 5 |
-0.0825 |
0.384 |
\(-\pi/2\) |
\(\theta_5\) |
Joint 6 |
0 |
0 |
\(\pi/2\) |
\(\theta_6\) |
Joint 7 |
0.088 |
0 |
\(\pi/2\) |
\(\theta_7\) |
Let the frame attached at the i-th joint be denoted as \(\{i\}\). For \(i=1,2,\cdots, 7\), the relation between frame \(\{i\}\) and \(\{i-1\}\) is:
Subscript \(i\) denotes the DH parameter of joint \(i\). Moreover, frame \(\{0\}\) is equal to the fixed frame \(\{S\}\) attached at the origin.
From this, we can find the frame attached at the \(i\)-th joint by matrix concatenation:
The result plotted in Exp[licit] (right) is consistent with the result shown from the franka website (left).
Let the CoM location of the \(i\)-th link, expressed in frame \(\{i\}\), be denoted as \({}^{i}\mathbf{c}_i := [{}^{i}c_{x,i},{}^{i}c_{y,i},{}^{i}c_{z,i}]\), (shown in the table above). We need to map these values from frame \(\{i\}\) to frame \(\{S\}\). Thus, for \(i=1,2,\cdots,7\):
From this, we find the position of the CoM, expressed in frame \(\{S\}\). The detailed location and its values are posted in this section.
Finally, we derive the moment of inertia, but with respect to the axes of frame \(\{S\}\). Let the moment of inertia about frame \(\{i\}\) be represented by matrix \({}^{i}\mathbf{I}_i\). To express with respect to frame \(\{S\}\) we use the following mapping:
In this equation \({}^{S}\mathbf{R}_i\in SO(3)\), which can be derived from \({}^{S}\mathbf{H}_i\). This eventually gives us the inertia matrix shown in this section.