Double Pendulum
The double pendulum (often called “Acrobot”), is a heavily used example in academia. The geometric and inertial parameters are shown below:
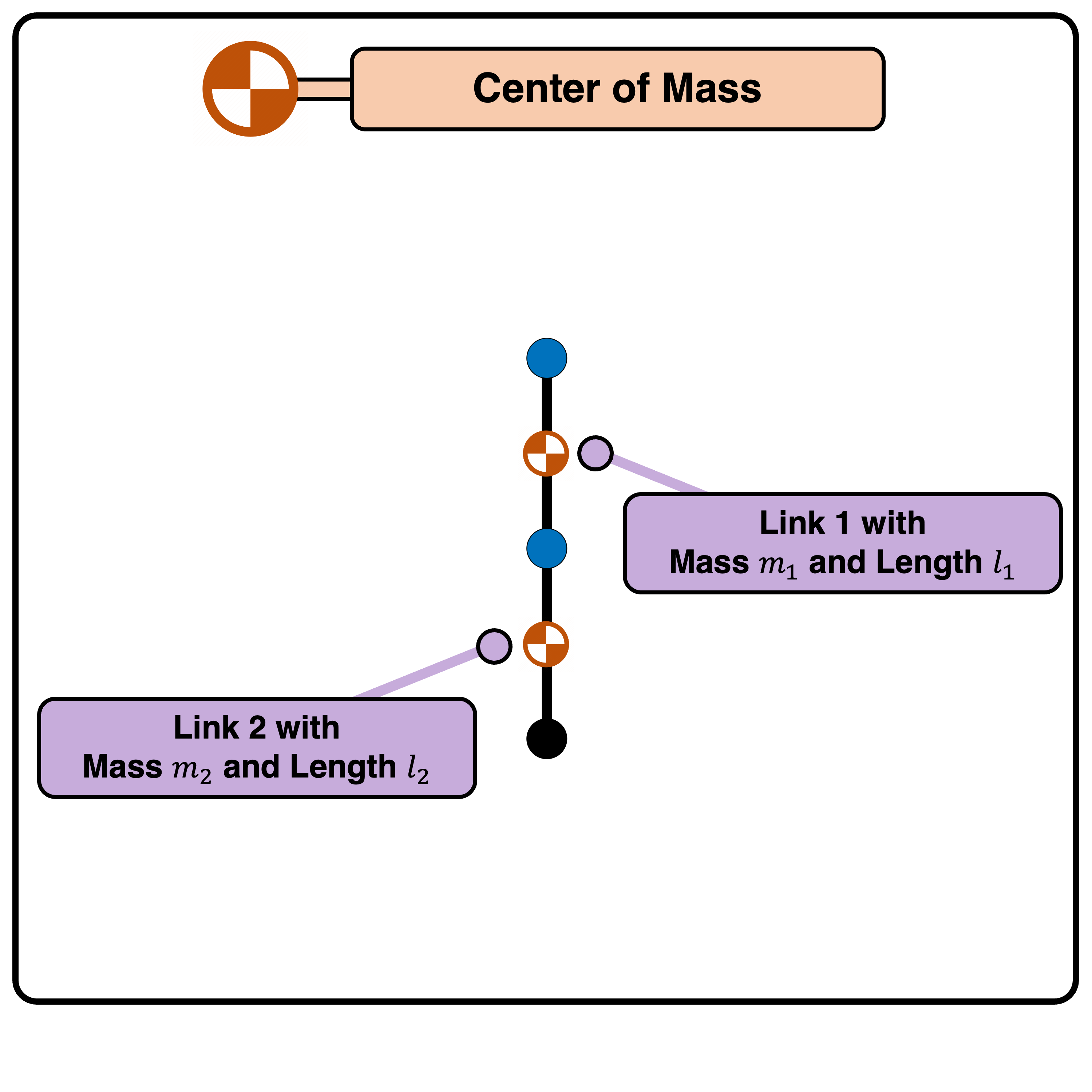
The first link with mass \(m_1\) and length \(l_1\).
The second link with mass \(m_2\) and length \(l_2\).
Here, we assume links with uniform mass distribution.
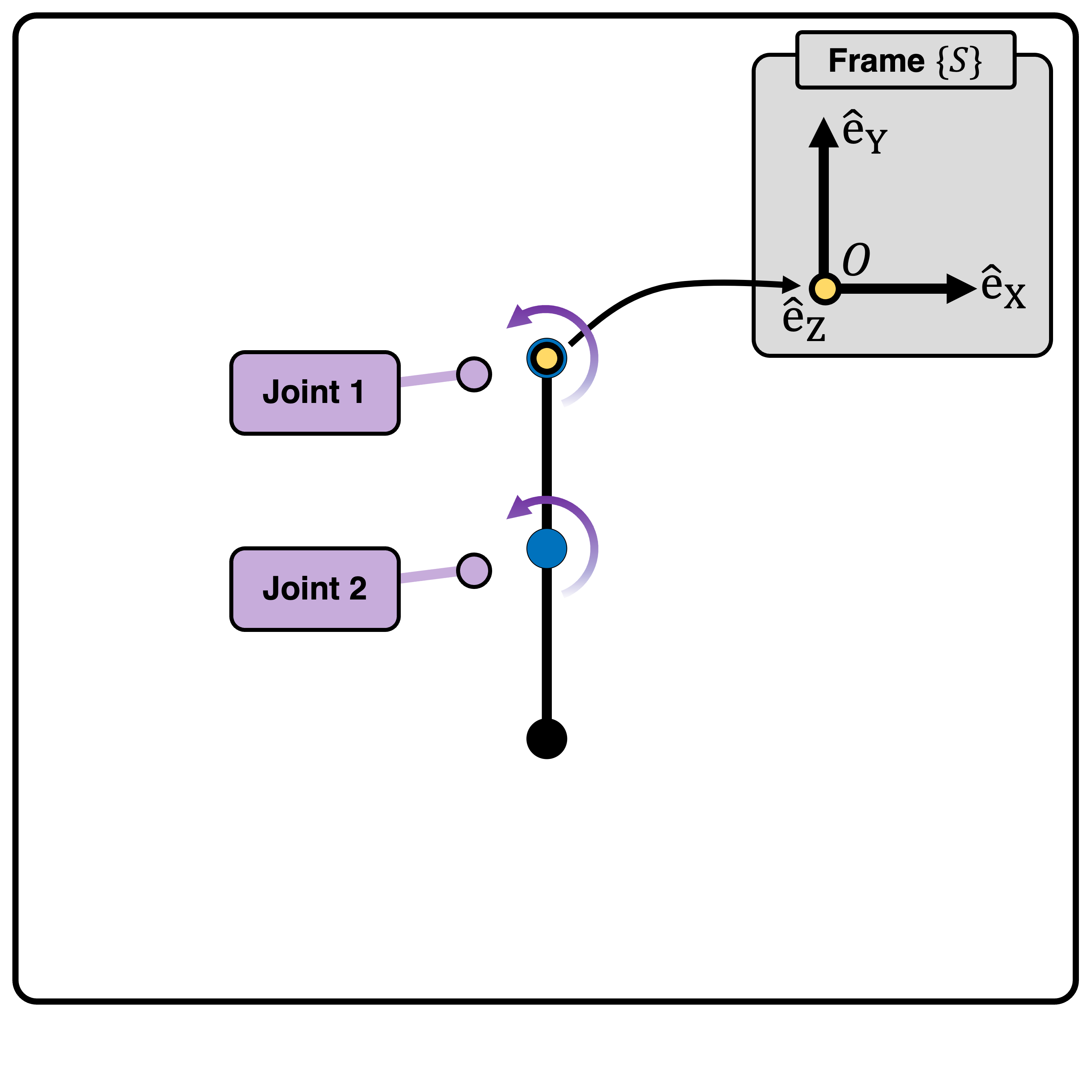
Initial Configuration and Joint Parameters
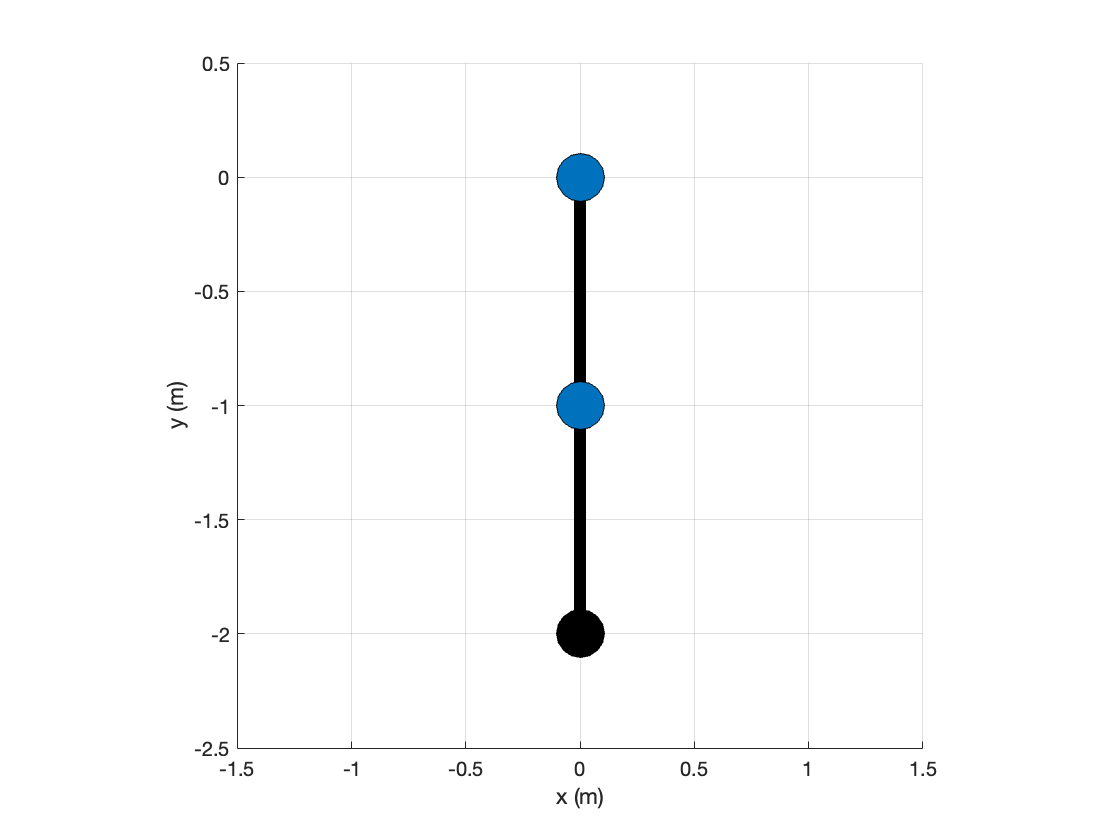
Below, the robot in initial configuration with stationary coordinate frame \(\{S\}\) and origin \(\{O\}\) is shown:
Joint |
Type |
Point on Joint Twist Axis (m) |
Joint Direction |
Joint Twist |
|---|---|---|---|---|
Joint 1 |
Revolute (1) |
(0, 0, 0) |
(0, 0, 1) |
(1, 0, 0, 0, 0, 0) |
Joint 2 |
Revolute (1) |
(0, \(-l_1\), 0) |
(0, 0, 1) |
(\(-l_1\), 0, 0, 0, 0, 1) |
Example code
To construct the cart-pole robot, run the following code:
% Geometric and Inertial Parameters of the double pendulum robot
m1 = 1; % The mass of the first link
m2 = 1; % The mass of the second link
l1 = 1; % The length of the first link
l2 = 1; % The length of the second link
% Construct the double-pendulum robot and initialize
robot = DoublePendulum( m1, m2, l1, l2 );
robot.init( )
% Attach the double-pendulum robot to animation for visualization
anim = Animation( 'Dimension', 2, 'xLim', [-1.5,1.5], 'yLim', [-2.5,0.5] );
anim.init( )
anim.attachRobot( robot )
The output figure should look like this: