KUKA LBR iiwa 14
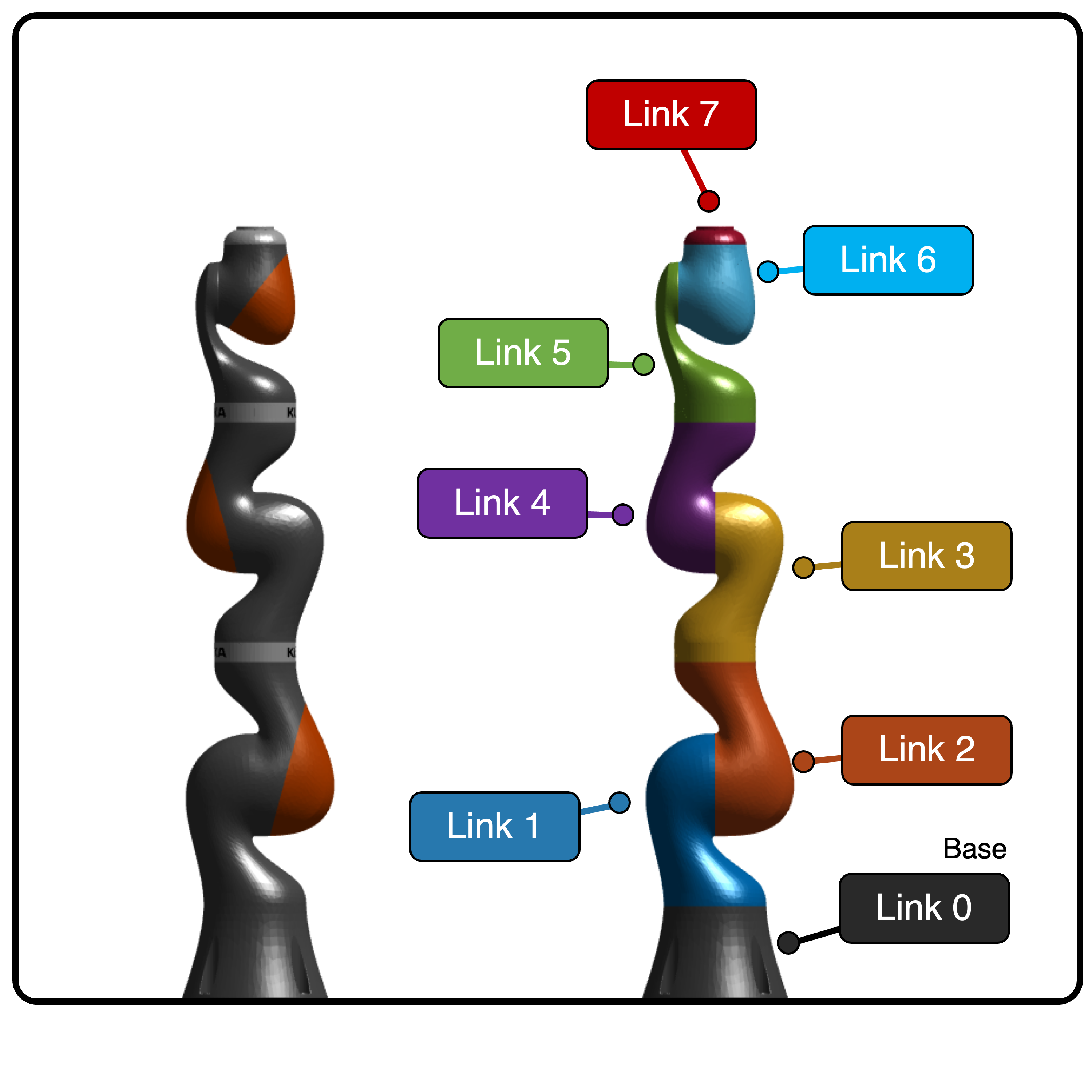
The KUKA LBR iiwa 14 is a kinematically redundant robot with 7 DOF. The links and the fixed base of the robot are shown below.
The links and the fixed basis of the robot are shown below:
Example Exp[licit]-MATLAB
To construct a KUKA LBR iiwa 14 in Exp[licit]-MATLAB, run the following code:
% Construct Kuka object, with high visual quality
robot = iiwa14( 'high' );
robot.init( );
% Set figure size and attach robot for visualization
anim = Animation( 'Dimension', 3, 'xLim', [-0.7,0.7], 'yLim', [-0.7,0.7], 'zLim', [0,1.4] );
anim.init( );
anim.attachRobot( robot )
The output figure should look like this:
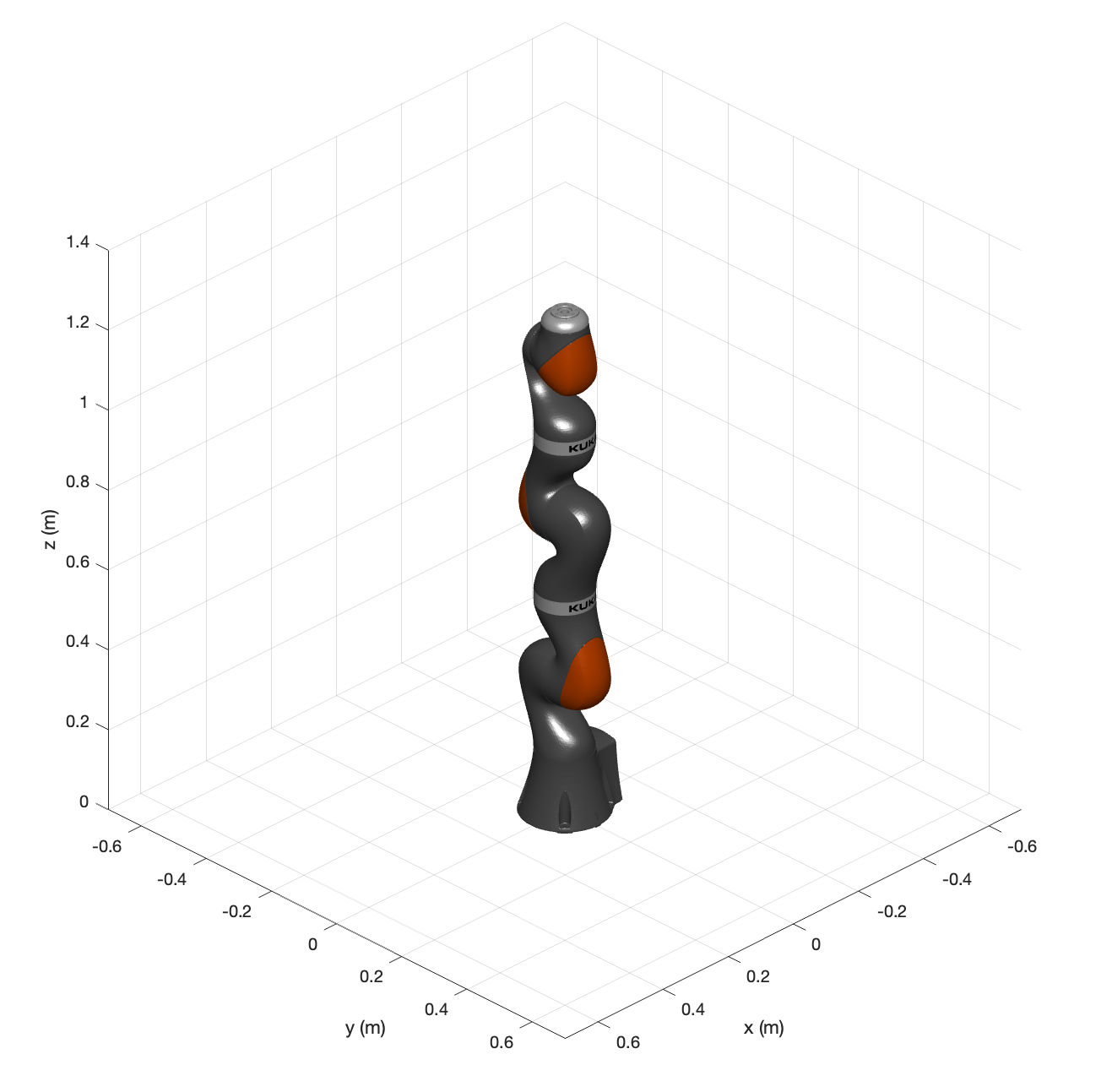
An example application for the KUKA LBR iiwa 14 can be found under /examples/main_iiwa14.m.
Example Exp[licit]-FRI
To construct a KUKA LBR iiwa 14 in the Client Application of FRI (C++), run the following code in the constructor of MyLBRClient.
// Use Explicit-cpp to create your robot
myLBR = new iiwa14( 1, "Trey");
myLBR->init( );
// Current joint configuration
q = Eigen::VectorXd::Zero( myLBR->nq );
The member functions of the myLBR-object can then be used in the MyLBRClient:command()-method:
// Homogeneous Transformation Matrix
H = myLBR->getForwardKinematics( q );
// Hybrid Jacobian Matrix (6x7)
J = myLBR->getHybridJacobian( q );
// Mass matrix
M = myLBR->getMassMatrix( q );
The basic application calculates the Forward Kinematics, Jacobian Matrix, and Mass matrix of the robot and prints the calculational effort.
To get started with FRI (C++), we provide a “basic application.” The source file includes an iir-filter, with coefficients determined via winfilter. The filter is needed to activate the robot’s build-in friction compensation. Before sending the torques, we add a simple mean filter to smooth out the torque signals.